You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Fundamentals of Linear Algebra - Ya. S. Bugrov PDFDocument189 pagesFundamentals of Linear Algebra - Ya. S. Bugrov PDFLucius Thales da SilvaNo ratings yet
- Using History To Teach Mathemat - Victor J. Katz PDFDocument267 pagesUsing History To Teach Mathemat - Victor J. Katz PDFLucius Thales da SilvaNo ratings yet
- The Geometry of Vector Fields - Yu. AminovDocument2 pagesThe Geometry of Vector Fields - Yu. AminovLucius Thales da Silva100% (1)
- The Geometry of Vector Fields - Yu. Aminov PDFDocument186 pagesThe Geometry of Vector Fields - Yu. Aminov PDFLucius Thales da Silva100% (4)
- First Course in Algebra-Part 1 - Several Authors PDFDocument258 pagesFirst Course in Algebra-Part 1 - Several Authors PDFLucius Thales da SilvaNo ratings yet
- Balkan Mathematical Olympiad 20 - Several Authors PDFDocument6 pagesBalkan Mathematical Olympiad 20 - Several Authors PDFLucius Thales da SilvaNo ratings yet
- Theory of Orbits - Perturbative - Dino Boccaletti PDFDocument402 pagesTheory of Orbits - Perturbative - Dino Boccaletti PDFLucius Thales da Silva100% (1)
- Theory of Orbits - Perturbative - Dino Boccaletti PDFDocument402 pagesTheory of Orbits - Perturbative - Dino Boccaletti PDFLucius Thales da Silva100% (1)
- Elementary Geometry of Algebrai - C. G. Gibson PDFDocument268 pagesElementary Geometry of Algebrai - C. G. Gibson PDFLucius Thales da Silva100% (1)
- Convex Polytopes - B. Grunbaum PDFDocument44 pagesConvex Polytopes - B. Grunbaum PDFLucius Thales da SilvaNo ratings yet
- Geometria Intuitiva Emma CastelnuovoDocument354 pagesGeometria Intuitiva Emma CastelnuovoLucius Thales da Silva100% (3)
- Solucionario Wunsch 3Document715 pagesSolucionario Wunsch 3Wilmer KrdozoNo ratings yet
- Probability (Graduate Texts in - Albert N. Shiryaev PDFDocument636 pagesProbability (Graduate Texts in - Albert N. Shiryaev PDFLucius Thales da Silva92% (12)
- Student Mathematical Library Se - AMSDocument19 pagesStudent Mathematical Library Se - AMSLucius Thales da SilvaNo ratings yet
- Theory of Group Representations - A. O. Barut PDFDocument736 pagesTheory of Group Representations - A. O. Barut PDFLucius Thales da Silva100% (2)
- Lecciones Populares de Matemáticas. División InexactaDocument84 pagesLecciones Populares de Matemáticas. División InexactaIng. Eliézer Martínez100% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dalit Movements in IndiaDocument4 pagesDalit Movements in IndiaVikasNo ratings yet
- Stray Animal Control Practices (Europe)Document62 pagesStray Animal Control Practices (Europe)wez99No ratings yet
- Worlds Numberless and StrangeDocument226 pagesWorlds Numberless and Strangetempman100% (2)
- Best British Play Wrights of The 20th CenturyDocument2 pagesBest British Play Wrights of The 20th CenturyKanniyammalNo ratings yet
- Entrepreneurship Project ReportDocument12 pagesEntrepreneurship Project Reportqwgd25% (4)
- Artikel Widyawati JPN - TransDocument12 pagesArtikel Widyawati JPN - TransAkhmad Edwin Indra PratamaNo ratings yet
- Saros Cycle Dates and Related Babylonian Astronomical Texts A.Aboe, JP Britton, JA Henderson, O.Neugebauer, and AJ SachsDocument42 pagesSaros Cycle Dates and Related Babylonian Astronomical Texts A.Aboe, JP Britton, JA Henderson, O.Neugebauer, and AJ SachsWolfgangNo ratings yet
- Vol. 16 No. 4 Boulder, Colorado April, 2001Document24 pagesVol. 16 No. 4 Boulder, Colorado April, 2001RoelNo ratings yet
- Paper I QuestionsDocument21 pagesPaper I QuestionsKumar RaghuvanshamNo ratings yet
- Chapter - Iv Evolution and Progress of SHGS: An Overview: 4.1. Origin of Self Help Group MovementDocument47 pagesChapter - Iv Evolution and Progress of SHGS: An Overview: 4.1. Origin of Self Help Group MovementBurhanuddin FarighNo ratings yet
- Spe 3601 MS PDFDocument11 pagesSpe 3601 MS PDFRanggaNo ratings yet
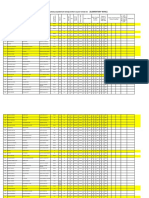
- Tentative Senoirity PST Female 19-12-2022Document21 pagesTentative Senoirity PST Female 19-12-2022PecoboNo ratings yet
- Synergos 2002 Annual ReportDocument23 pagesSynergos 2002 Annual ReportSynergos InstituteNo ratings yet
- CV Whittington 2019.12 - SimplifiedDocument5 pagesCV Whittington 2019.12 - SimplifiedAnna WhittingtonNo ratings yet
- Women in Mongol Iran - The Khatuns PDFDocument309 pagesWomen in Mongol Iran - The Khatuns PDFMahomad Abenjúcef100% (1)
- ICNDT Guidelines 2016Document36 pagesICNDT Guidelines 2016Ndt ElearningNo ratings yet
- Srinivasa RamanujanDocument2 pagesSrinivasa RamanujanVinod Kumar100% (1)
- Albert Pike and Three World WarsDocument5 pagesAlbert Pike and Three World WarsRadu Iliescu100% (5)
- Land Law and Islam (English Language Version)Document256 pagesLand Law and Islam (English Language Version)United Nations Human Settlements Programme (UN-HABITAT)No ratings yet
- CRAVEN y DAVIS Feminist Activist Ethnography Counterpoints To Neoliberalism in North AmericaDocument298 pagesCRAVEN y DAVIS Feminist Activist Ethnography Counterpoints To Neoliberalism in North AmericaMaria Silenia Villalobos QuevedoNo ratings yet
- New Public AdministrationDocument25 pagesNew Public AdministrationMimansa100% (8)
- Harry Potter and The Half-Blood Prince - Comprehension QuestionsDocument5 pagesHarry Potter and The Half-Blood Prince - Comprehension Questionshsm2fangurlNo ratings yet
- Ielts Reading Test 1 - by Sam MccarterDocument13 pagesIelts Reading Test 1 - by Sam MccarterTrung Chánh Nguyễn67% (3)
- Lesson 13 Social, Cultural Political ChangesDocument21 pagesLesson 13 Social, Cultural Political ChangesIan Vergel CuevasNo ratings yet
- Constitution Scheduled Tribes Order 1950Document15 pagesConstitution Scheduled Tribes Order 1950GK TiwariNo ratings yet
- Soviet Flower ChildrenDocument21 pagesSoviet Flower ChildrenKimmie PetkovNo ratings yet
- CV Dennhardt 2019Document14 pagesCV Dennhardt 2019api-291725871No ratings yet
- SECTION 23 05 00 Common Work Results For Hvac: Based On DFD Master Specification Dated 08/01/14Document9 pagesSECTION 23 05 00 Common Work Results For Hvac: Based On DFD Master Specification Dated 08/01/14htanhNo ratings yet
- English Etymology PDFDocument695 pagesEnglish Etymology PDFAlex SampsonNo ratings yet