Acelerómetro: medición de aceleración y vibraciones
•Descargar como DOCX, PDF•
5 recomendaciones•18,502 vistas

El documento describe diferentes tipos de acelerómetros, incluyendo acelerómetros elementales que usan contactos eléctricos precargados, acelerómetros capacitivos que miden la capacidad entre placas, y acelerómetros piezoeléctricos que generan voltaje cuando son deformados. También explica la configuración básica de un acelerómetro como un sistema de masa-resorte amortiguado y deriva la ecuación diferencial que rige el movimiento. Finalmente, discute varias tecnologías de acelerómetros y sus principios de funcion

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Acelerómetro: medición de aceleración y vibraciones
Similar a Acelerómetro: medición de aceleración y vibraciones (20)
Más de Bertha Vega
Más de Bertha Vega (20)
Acelerómetro: medición de aceleración y vibraciones
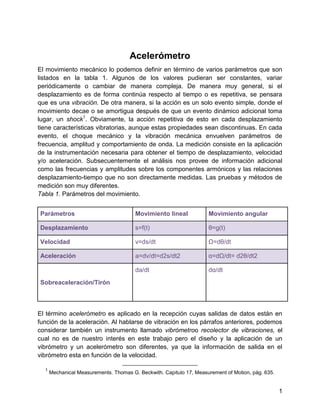
- 1. Acelerómetro El movimiento mecánico lo podemos definir en término de varios parámetros que son listados en la tabla 1. Algunos de los valores pudieran ser constantes, variar periódicamente o cambiar de manera compleja. De manera muy general, si el desplazamiento es de forma continúa respecto al tiempo o es repetitiva, se pensara que es una vibración. De otra manera, si la acción es un solo evento simple, donde el movimiento decae o se amortigua después de que un evento dinámico adicional toma lugar, un shock1. Obviamente, la acción repetitiva de esto en cada desplazamiento tiene características vibratorias, aunque estas propiedades sean discontinuas. En cada evento, el choque mecánico y la vibración mecánica envuelven parámetros de frecuencia, amplitud y comportamiento de onda. La medición consiste en la aplicación de la instrumentación necesaria para obtener el tiempo de desplazamiento, velocidad y/o aceleración. Subsecuentemente el análisis nos provee de información adicional como las frecuencias y amplitudes sobre los componentes armónicos y las relaciones desplazamiento-tiempo que no son directamente medidas. Las pruebas y métodos de medición son muy diferentes. Tabla 1. Parámetros del movimiento. Parámetros Movimiento lineal Movimiento angular Desplazamiento s=f(t) θ=g(t) Velocidad v=ds/dt Ω=dθ/dt Aceleración a=dv/dt=d2s/dt2 α=dΩ/dt= d2θ/dt2 da/dt dα/dt Sobreaceleración/Tirón El término acelerómetro es aplicado en la recepción cuyas salidas de datos están en función de la aceleración. Al hablarse de vibración en los párrafos anteriores, podemos considerar también un instrumento llamado vibrómetroo recolector de vibraciones, el cual no es de nuestro interés en este trabajo pero el diseño y la aplicación de un vibrómetro y un acelerómetro son diferentes, ya que la información de salida en el vibrómetro esta en función de la velocidad. 1 Mechanical Measurements. Thomas G. Beckwith. Capitulo 17, Measurement of Motion, pág. 635. 1
- 2. Ahora bien, un acelerómetro mide la aceleración de un objeto al que va unido y lo hace respecto de una masa inercial interna. Existen varios tipos de tecnologías y diseños que pueden ser muy distintos entre sí según la aplicación a la cual van destinados y las condiciones en las serán utilizados. La forma de seleccionar un acelerómetro adecuado hay que tomar en cuenta los rangos de temperatura y frecuencia, tamaño, gravedad, resistencia al maltrato y el precio. Este tipo de instrumentación recolecta información relacionada con las vibraciones y oscilaciones, lo cual era usado casi siempre de manera industrial, pero en los últimos años su uso ha sido diversificado. Concepto de Vibración Cuando un objeto cambia u oscila sus puntos respecto a su posición de equilibrio se le conoce como vibración. También se le puede definir como la energía cinética en cuerpos rígidos de masa finita el cual recibe una entrada de energía dependiente del tiempo. Esta se puede estudiar como las oscilaciones mecánicas en un sistema dinámico. A través de transductores de oscilaciones se transforman las vibraciones en señales eléctricas. Un ejemplo son los acelerómetros. Los transductores son capaces de medir la velocidad lineal, desplazamiento, proximidad y aceleración en sistemas sometidos a vibración. A grandes rasgos estos reciben una señal mecánica que convierten en eléctrica, la cual se encuentra en función de la vibración. Pueden estar conectados a un sistema de registro de datos, o funcionar independientemente. Estos transductores de vibración pueden tener de uno a tres ejes ortogonales de medición, involucrando cinco características principales a tomar en cuenta: Rango de medición: en unidades “g” para la aceleración, in/s para la velocidad lineal, in y otras unidades para el desplazamiento o proximidad. Rango de frecuencia: medida en Hz (Hertz) Precisión: porcentaje de error permisible sobre el rango completo de medición Sensibilidad transversal: efecto que una fuerza ortogonal puede afectar a la fuerza medida en cuestión, también se representa en un porcentaje con escala de interferencia permisible Condiciones ambientales: temperatura, fuerza de vibración, choque, etc. Existen dos tipo de transductores de aceleración, se les conoce como acelerómetros piezoresistivos o piezoelétricos. Acelerómetros elementales Probablemente el más elemental acelerómetro es un dispositivo que indica el nivel de aceleración. Todos los instrumentos nos mostrarán si existe una variación entre niveles de aceleración, indicando si un predeterminado nivel se alcanzó o no. 2
- 3. En la figura 1 se muestra un diagrama de este instrumento, que utiliza una precarga eléctrica de contacto. En teoría el efecto de las fuerzas de inercia que actúan sobre el muelle y la masa excede el ajuste inicial, el contacto se romperá y esta acción señalará un “tropiezo” en el indicador. Figura 1. Acelerómetro precargado con muelle.2 El nivel de aceleración es determinado si se presentan o no fracturas en la tensión. Estrictamente el material que debe ser usado para la tensión debe ser quebradizo, de otra manera el trabajo en frío origina un historial de aceleración previa que cambiará las propiedades físicas y la calibración. Dado que estos materiales no existen, esto se convierte en una limitante importante. Ecuación de un acelerómetro. Configuración de un sismógrafo. Para comprender de mejor manera la configuración de una acelerómetro, es necesario comprender la configuración de un sismógrafo. Ya que usualmente se utiliza “masa sísmica” en el acelerómetro, la acción del sismógrafo es función de la aceleración a través de la masa inercial. En la Figura 2 podemos ver esquemáticamente un sismógrafo. 2 Mechanical Measurements. Thomas G. Beckwith, 4° ed, Fig 17.2, pág. 638. 3
- 4. Figura 2. Sismógrafo.3 Se toma un sistema que considera un grado de libertad con humectación viscosa, excitado por un movimientos armónico que viene desde el apoyo. Un punto importante que debe ser tomado en cuenta es que se asume que es un movimiento armónico simple, que estrictamente hablando, restringe las relaciones a un caso limitado. Tenemos: M = masa del elemento sísmico = constante dimensional =constante de deformación del resorte =coeficiente de humedad = desplazamiento total de la masa M en estado de equilibrio = desplazamiento de amplitud de la masa = desplazamiento del apoyo = desplazamiento relativo entre la masa y el soporte, que es el desplazamiento secundario que será detectado. desplazamiento relativo de amplitud entre la masa y el soporte = cualquier momento en el tiempo a partir de t=0 3 Mechanical Measurements. Thomas G. Beckwith, 4° ed, Fig 17.3, pág. 639. 4
- 5. = frecuencia de excitación = frecuencia natural humectada = ángulo de la fase Aplicando la segunda ley de Newton para un cuerpo libre con masa , encontramos que la ecuación diferencial para el movimiento del cuerpo es; ….(1) Donde cada término representa una fuerza ; sustituyendo …..(2) ….(3) sabiendo que ….(4) Entonces la ecuación diferencial lineal de coeficientes constantes de segundo orden, la simplificamos de la siguiente manera. ….(5) Donde Y ....(6) El primer término a la derecha de la Ec. 5 provee el componente transitorio, y el segundo término el componente estado estático. Si asumimos que el intervalo de tiempo es constante en la longitud , el término transitorio se ignora y podemos escribir ....(7) Configuración de un acelerómetro. En la figura se muestra un diagrama esquemático de un acelerómetro traslacional. La configuración del sistema es básicamente la misma que el sismógrafo, pero su diferencia esencial estriba en la selección de la frecuencia natural no amortiguada . Denotaremos el desplazamiento de la masa relativo al espacio inercial mediante y el de la caja relativo al espacio inercial mediante . El desplazamiento se mide desde la posición de equilibrio cuando . La entrada al acelerómetro traslacional es la aceleracióny, la salida es el desplazamiento de la masa relativo a la caja, o . El desplazamiento que se registra es el de . La ecuación de movimiento del sistema es mx+bx-y+kx-y=0 5
- 6. 4 En términos de desplazamiento relativo z, esta última ecuación se hace my+z+bz+kz=0 O bien mz+bz+kz=-my La trasformada de Laplace de esta última ecuación, suponiendo condiciones iniciales cero, da ms2+bs+kZ(S)=-ms2Y(s) La función de transferencia entre la salida de Z(S) y la entrada s2Y(s) es Z(S)s2Ys=-mms2+bs+k=-1s2+2ξωns+ωn2 De la ecuación anterior vemos que si la frecuencia natural no amortiguada ωnes suficientemente grande comparada con las frecuencias de la entrada, entonces Z(S)s2Ys∶ =-1ωn2 Así el desplazamiento de z es aproximadamente proporcional a y. Tecnologías de funcionamiento del acelerómetro y tipos ● Acelerómetro de Alta Impedancia Provee una señal de salida de fácil obtención, para después emplear métodos para convertirla a una de baja impedancia antes de ser enviada al sistema que registrará los 4 Imagen tomada de Dimámica de Sistemas, Ogata, pp.421 6
- 7. datos. Esta se mide en pC/g (pico coloumbs por g). Cuenta con algunas ventajas como el poder operar a temperaturas arriba de los 120 ºC. ● Acelerómetro de Baja Impedancia Se emplean sistemas microelectrónicos, cosa que el de alta impedancia no es capaz, los cuales detectan la carga generada por el sensor, de esta manera se obtiene directamente la señal en baja impedancia y solamente se transmite la señal. Sus unidades son los mv/g (milivoltios por unidad g). Sus ventajas es que no requiere la transformación de alta a baja impedancia y se utilizan cuando se requiere cubrir grandes distancias. ● Tecnología capacitiva. Estos dispositivos se encargan de variar la posición relativa de las placas de un micro condensador cuando este se encuentra bajo la influencia de aceleraciones. De otra manera, este tipo de acelerómetros se encargan de variar la capacidad entre varios conductores, dos o más, entre los cuales esta un material dieléctrico. Los sensores que son construidos con esta tecnología miden la aceleración cuando se encuentren integrados en un chip de silicio, este tipo de chips reduce los problemas relacionados con la humedad, temperatura, número total de terminales, etc. Los sensores son formados internamente por un conjunto de capacidades ancladas al circuito, por otro lado existe un conjunto de placas centrales que se encuentran unidas a anillos que permiten que se muevan estas placas. Como ejemplo, en el siguiente sensor las zonas más oscuras son las capacidades ancladas al circuito integrado (como Cao y Cbo), mientras que las placas centrales son las que se encuentran en el centro de dos capacidades fijas. Figura 3. Sistema de placas para sensor capacitivo. En reposo la placa central se debe encontrar entre las capacidades Cao y Cbo, por lo que el valor de estas será “Co”. Figura 4. Distancia entre las placas del sensor. Donde: d: distancia entre la placa central y las capacidades ξ: desplazamiento S: superficies de la placa 7
- 8. Cuando se aplica una aceleración en la dirección de la placa central, esta se moverá provocando que alguna de las capacidades aumente y otra disminuya, ya que como vimos en el modelo anterior esta se encuentra entre ambas capacidades. El valor de las capacidades respecto a los parámetros de distancia, desplazamiento y la capacidad en reposo, lo podemos resumir en el siguiente modelo matemático ...(8) ● Acelerómetros basados en tecnología piezoeléctrica. El funcionamiento viene regido por el efecto piezoeléctrico. Cuando el material sufre una deformación física, se modifica su estructura cristalina y cambian sus características eléctricas. Algunos materiales que son usados son el cuarzo, la sal y la turmalina, esta última posee piroelectricidad, y gracias a esta característica se genera una señal eléctrica cuando la temperatura del cristal es alterada. Las partes de un sensor de este tipo se ilustran el siguiente esquema. Figura 5. Partes del sensor piezoeléctrico. Figura 5.1 Acelerómetro piezoeléctrico. La mecánica consiste en pegar un cristal piezoeléctrico a una masa conocida para que cuando se encuentre sometido a vibración se genere una fuerza que actúe sobre el acelerómetro. Esta fuerza es el resultado de la aceleración por la masa sísmica. Debido a que la masa sísmica es constante se obtiene una señal proporcional a la aceleración de la misma. En la Figura 6 podemos observar el circuito equivalente de este tipo de acelerómetro en función de los parámetros del sistema. 8
- 9. Figura 6. Circuito equivalente del acelerómetro piezoeléctrico. Donde: k: constante del muelle. m: masa del sistema a: aceleración del sistema C: capacidades del circuito. Así mismo, en la siguiente imagen se muestra de manera genérica un sensor piezoeléctrico, que genera voltaje cuando es deformado. Figura 7. Sensor piezoeléctrico con voltimetro. Los elementos piezoeléctricos usados en este acelerómetro están hechos normalmente de circonato de plomo. Estos se encuentran comprimidos por una masa, sujeta al otro lado por un muelle y todo este sistema dentro de una caja metálica. Cuando el sistema es sometido a vibración, el disco piezoeléctrico se ve sometido a una fuerza variable, proporcional a la aceleración de la masa. Debido a la forma de funcionar del sensor se desarrolla un potencial variable que será proporcional a la aceleración. Dicho potencial variable se puede registrar sobre un voltímetro. Figura 8. Ejemplo de un acelerómetro piezoeléctrico. Los acelerómetros piezoeléctricos son muy utilizados en 9
- 10. procesos industriales gracias a su gran versatilidad, algunas de sus ventajas son: ○ Rango de medición elevado ○ Gran linealidad en su rango dinámico ○ Amplio rango de frecuencias ○ Tamaño compacto ○ Carece de partes movibles ○ No requiere alimentación externa ● Acelerómetros basados en tecnología piezorresistiva. Este tipo de instrumentos basan su funcionamiento en la propiedad que tienen las resistencias eléctricas de cambiar su valor cuando el material se deforma mecánicamente. Estos acelerómetros usan una masa suspendida por cuatro semiconductores (straingages). La masa acelerada perpendicularmente a la superficie deformando las galgas y cambiando así la resistencia en ellas de forma proporcional a la aceleración. La diferencia con los acelerómetros piezoeléctricos, los piezorresistivos sólo causan un cambio de resistencia y no producen potencial eléctrico. La ventaja de esta tecnología es que permite medir aceleraciones de hasta 0 [Hz] de frecuencia. Figura 9. Acelerómetro piezorresitivo. Un acelerómetro de galgas extensométricas utiliza este mismo principio, e igualmente mide frecuencias que llega hasta 0 [Hz]. Figura 10. Acelerómetro de galgas extensométricas ● Acelerómetros basados en tecnología mecánica Estos acelerómetros utilizan bobinas e imanes para obtener la medición. Lo que compone a un instrumento de este tipo son una masa y resortes que originan movimientos oscilatorios cuando se encuentran sometidos a aceleración. ● Acelerómetros basados en tecnología micromecánica MEMS Los MEMS (Sistemas Micro Electro-Mecánicos) son una tecnología que se utiliza como base para dispositivos muy pequeños, desde pocas micras hasta casi 1[mm] de 10
- 11. diámetro. La industria automovilística buscó desarrollar e implementar detectores de colisiones mediante esta tecnología y de esta forma pudo crear el sistema de bolsas de aire. El funcionamiento general de este acelerómetro se basa en que la aceleración provoca un movimiento en el sensor y un cambio en la capacidad de dos condensadores, así mismo el circuito hace que cambie la tensión de salida. Figura 11. Modelo del acelerómetro Calibración A fin de tener utilidad como instrumentos de medición los acelerómetros han de ser determinados las unidades de salida (voltaje en general), por unidad de entrada (desplazamiento, velocidad o aceleración). A la hora de calibrar un acelerómetro es importante indicar los valores constantes, a considerar a la hora de efectuar la medición. Existen pues dos enfoques a la hora de efectuar la calibración; la primera referida a métodos absolutos basada directamente en los conceptos físicos de masa, longitud, y tiempo, el segundo camino será pues la comparación de técnicas. ´Éste último emplea un “standard ”frente al cual el transductor es comparado , de ésta manera es clara la fiabilidad del standard; a fin de poder comparar dos movimientos “idénticos”. Pese a lo sencillo que pueda aparecer éste método es sin duda el más comúnmente empleado, ya que evite innumerables problemas. Los resultados libres de erros dependen del siguiente número de factores, 1.- El movimiento impreso ha de ser idéntica 2.- Las lecturas asociadas en ambos circuitos han de responder idénticamente. 3.-La fiabilidad de standard Calibración de Acelerómetros. Los métodos de calibración se clasifican como sigue: -Estática En éste método el acelerómetro es modelado como un sistema lineal capaz de corregir una desalineación interaxial. 11
- 12. Matemáticamente, al menos nueve ecuaciones diferentes , equivalentes a nueve posiciones del acelerómetro, son necesarias para resolver nueve incógnitas(3 factores escalares, 3 tendencias cero, 3 desalineaciones angulares). Sin embargo existe una nueva aproximación estudiada para minimizar el número de posiciones necesarias. Hablamos pues de tres ecuaciones lineales que corresponden a cada eje. Para obtener las ecuaciones de un acelerómetro triaxial , éste ha de ser posicionado en doce orientaciones conocidas y los resultados de éstas, de tal forma que todas las combinaciones posibles de posiciones sean probadas iterativamente. Finalmente los resultados de las doce posiciones y los seis puntos son idénticos permitiendo así resolver las nueve incógnitas a partir de las seis adecuadas. Modelo Lineal con corrección del Error. La precisión de los resultados de un acelerómetro, varía por un pequeño margen angular inter-axial. Sin embargo el error puede ser corregido asumiendo que x v coincide con xa de donde SP Y Sa son un g-vector sobre el plano coordenado y eje del sensor. TPA es la transformación de la matriz conocida como matriz de corrección que asigna a Sa a SP Pudiendo modelar el sensor de la siguiente manera: Donde Vi es el vector de salida (VX, VY,VZ) K es la Diagonal de la matriz escalar (volts/g) Spi es el vector fuerza g de la plataforma coordenada. Tpa es la matriz de corrección de la desviación interaxial. De esta forma los nueve parámetros a continuación han de ser resueltos. Matemáticamente se necesitan pues al menos nueve datos ó muestras para en todo caso llegar a una solución. 12
- 13. Para el eje Z el proceso es el más simple ya que sólo (b z,k2), seguido por el eje Y de donde las incógnitas son tres (b y, ky, azx) y finalmente el eje x con sus cuatro incógnitas desconocidas (bx, kx, ayzazy). Donde: Donde : Que finalmente se puede resolver como una ecuación lineal de la forma y=Ax. Para los datos conocidos y la matiz de coeficientes el valor de x se encuentra simplemente multiplicando por la inversa de la matriz de coeficientes . Finalmente simplemente hay que recordar que la solución de una ecuación lineal es no singular y única si el rango de nuestra matriz A es igual al número de variables. Aplicaciones La medición de la vibración tiene grandes aplicaciones, últimamente la más solicitada por mucho es los teléfonos celulares, actualmente todos los teléfonos de última generación incluyen este dispositivo el cual es de mucha ayuda para gran variedad de aplicaciones, pero no es la única aplicación de los acelerómetros. Entre sus aplicaciones que más rápidamente nos vienen a la mente son el automoviles, tan solo en 1890 se patentó un acelerómetro de péndulo, para registrar la aceleración y el frenado de vehículos de carretera y ferrocarril por parte de la marca de autos Lanchester. A continuación se enlistan otras tantas más aplicaciones. 13
- 14. ● Industria: en general se utilizan para medir las vibraciones de las máquinas, usualmente trabajan en cierto rango de vibraciones, pero si es excedido dicho rango envía una señal notificando que la máquina está funcionando anormalmente, lo cual indicaría un fallo en el sistema u operación en condiciones no adecuadas. ● Industria militar: se incorporan acelerómetros al momento de la fabricación de misiles y otro tipo de armamento. Esto se debe a que una vez lanzado el objeto éste irá reportando cual es su aceleración, velocidad y en que dirección. Así se establece el momento preciso en el que se detonará la carga para un mayor daño al objetivo. ● Sistema de navegación inercial: basado en acelerómetros y sensores de rotación conectados a una computadora. Este sistema ocupa la aplicación del acelerómetro para determinar posición, aceleración, velocidad y rapidez. Esta navegación aunque estimada es muy útil ya que no se necesita referencia externa para su uso. Este sistema es usado en barcos, submarinos, naves espaciales y aeronaves. Existe una variación de este sistema que es usado para helicópteros, ya que a diferencia de las aeronaves con ala fija, utilizado una ala rotatoria. El rotor proporciona los datos de desplazamiento como elevación. ● Robots: en operación, un brazo mecánico que sirva para mover objetos de un lugar a otro tiene que establecer cierta fuerza para agarrar el objeto, esta fuerza se debe medir debido a que si la excede puede dañar el objeto, o si es muy poca podría deslizarse el objeto durante su trayectoria. ● Teléfonos celulares: Se utilizan para saber la rotación de los dispositivos, su inclinación, aceleración. Algunas aplicaciones ocupan el acelerómetro para determinar la orientación de la pantalla del dispositivo y rotarla de acuerdo a su posición. Existen juegos que ocupan la aceleración en los ejes para funcionar (girar el celular para conducir un auto de carreras, mover una esfera, etc.). De la misma manera un sistema de GPS ocupa la aceleración del celular para obtener una ubicación más detallada en navegación. De ésta última aplicación en el SO móvil Android se pueden instalar aplicaciones para determinar el movimiento en cada eje y registrarlo. 14
- 15. En las imágenes se puede apreciar el movimiento que se capta mediante el acelerómetro en el celular, se trata de un acelerómetro multi-eje que capta el movimiento en cada eje y se obtiene la rapidez. La mayoría de las aplicaciones desarrolladas actualmente utilizan las funciones del acelerómetro para una mayor interacción y obtener más funciones. Un ejemplo es la aplicación “AccSim” para iOS 6 donde nos señala igualmente los valores en cada eje que se obtienen con el acelerómetro en cierta posición que tiene el dispositivo, en este caso un iPod. En general los acelerómetros son de gran utilidad en muchos aspectos de la vida cotidiana, gran cantidad de dispositivos incluyen esta tecnología. Hay aparatos que dependen de la presencia de un sensor de aceleración o desplazamiento para obtener coordenadas, posicionarse, o decidir que acción tomar en base a los datos registrados por un acelerómetro. Referencias y fuentes de consulta: 15
- 16. ● Beckwith, Thomas G. “Mechanical Measurements”. 4° edicion, Editorial Addison- Wesley Publishing Company. 1990. ● “Diseño e implementación de un acelerómetro, velocímetro móvil digital Controlado por un PIC de MICROCHIP”. Disponible en internet. http://upcommons.upc.edu/pfc/bitstream/2099.1/7998/1/memoria%20PFC.pdf Consultado del 16 al 22 de septiembre del 2012 ● “Diseño y construcción de un prototipo usando un acelerómetro tridimensional para la determinación de movimientos de un vehículo”. Disponible en internet http://bibdigital.epn.edu.ec/bitstream/15000/1721/1/CD-2329.pdf Consultado el 22 de septiembre del 2012 ● Pineda Lopez, Ivan, "Sistema automatizado de calibración de sensores de desplazamiento, fuerza y aceleración". Tesis Licenciatura (Ingeniero Electrico- Electronico)-UNAM, Facultad de Ingenieria México 2006 ● BalakumarBalachandran, Edward B. Magrab, "Vibraciones". CengageLearning Editores. México 2006 16