This arduino controled robot is 3D printed, and walks on it’s 6 legs. Designed to not need any screws, it assembles as a lego.
DYOR Screwless 3D printable hexapod
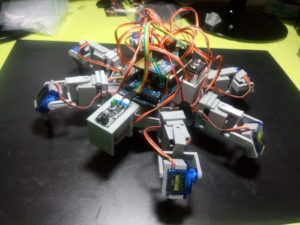
Moved by it’s 12 SG90 microservos, this walking robot can be reproduced at home without the need of a screwdriver. Designed to be light because of the restrictions that the smallest of the comercial microservos, the TowerPro SG90, has, with the battery and the 5000mAh 2A powerbank it weights only half a kilogram.
Walks using three of it’s legs at a time, as nature has proven more convenient, and it’s controled by the commands it recieves from the bluetooth module that’s been instaled. With an android app designed using MIT’s App Inventor, the hexapod enters in three diferent modes at command: dance, aggression and remote control.
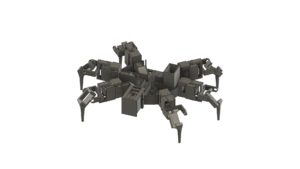
Design
It was designed from scratch using Autodesk’s Fusion 360, with measures adjusted for the SG90 servos, to avoid having to screw them to the plastic leg, and the angle at which the forces are applied makes imposible for the servos to get out of their position. The legs are designed in a modular fashion, to be easy to assemble and easy to substitute them if any one of them broke. It also helps with transport because it easy to reassemble them.
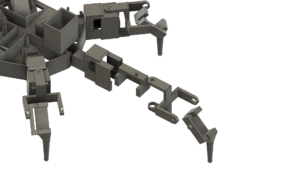
Notes about the 3D print:
- Any imperfection in the 3D print of the legs parts will take a big toll on it’s capability to be assembled. If your 3D printed is not well calibrated you’ll have to take an abrasive file and work the pieces.
- Around 200g of filament can be expected to be used in the whole hexapod, without taking into acount the supports, which will be needed.
Electronic components
- Arduino MEGA
- PCA9685
- 13 SG90 microservo
- Object detection module KY-032
- Bluetooth module HC-05
- 2 LED diodes
- 2 resistors
- 1 button
Working modes
- Remote control: using the phone’s accelerometer the app sends data depending on how you turn the phone, and the arduino interprets the data to control the hexapod. You can make the hexapod walk forward, backward, and turn in place both to the left and to the right.
- Dance: a simple mode that both tests all the leg’s servos and makes the hexapod do a little dance with it’s front legs. It adopts a posture that allows it to be stable with just 4 of it’s 6 legs, and then moves the front legs.
- Aggression: the head servo starts turning ~40º to both sides, aiming the object detection module. When it detects something within the

